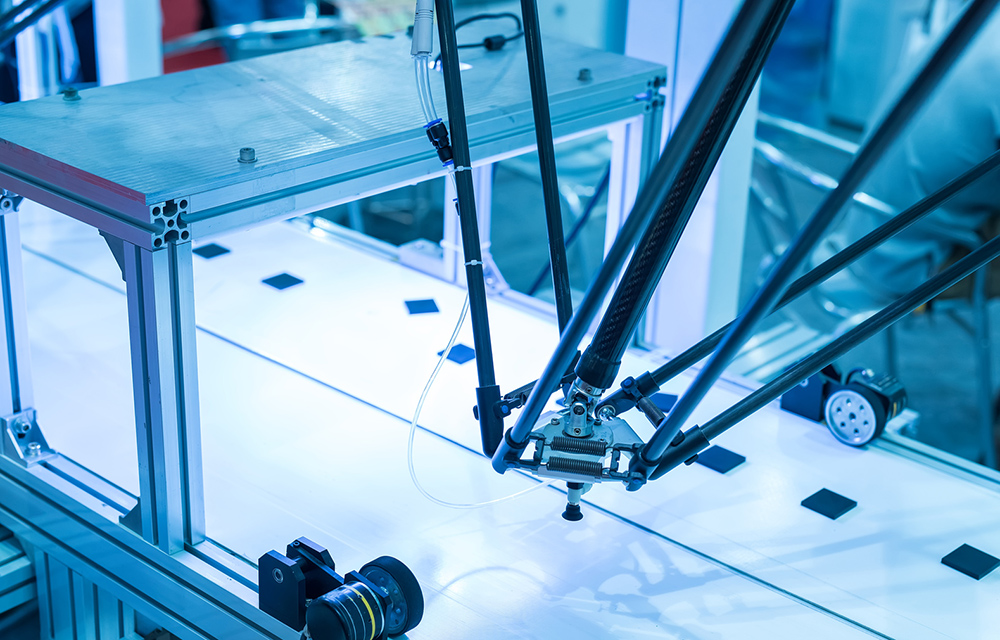
Parallel robots are able to position objects with high precision and at high speed, thus allowing for short cycle times. The main disadvantage of parallel-kinematic structures: They can position objects, but fall short when it comes to orienting them, i.e. align them in space. This makes them inflexible.
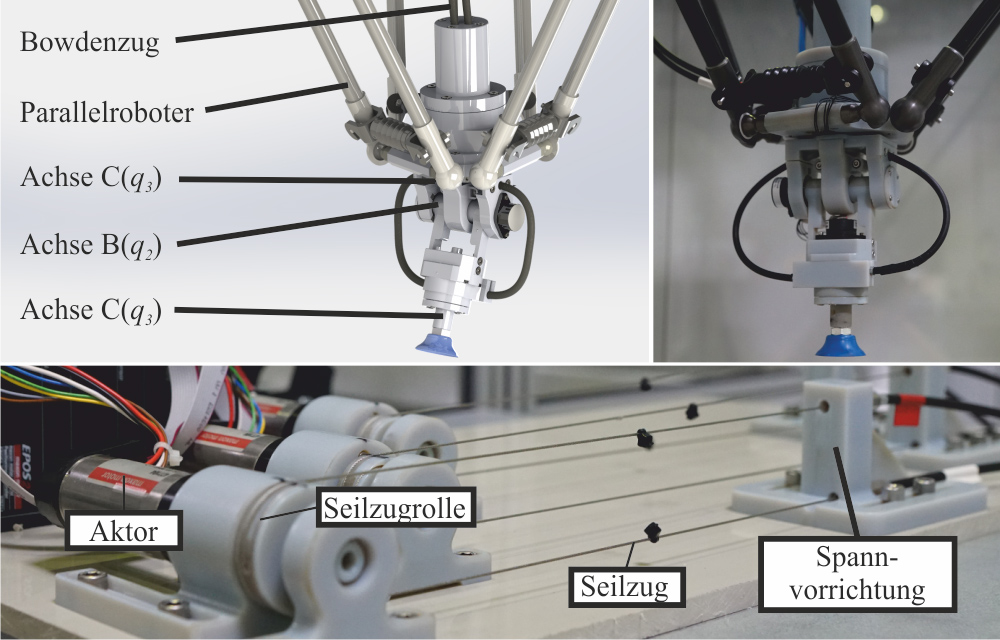
Researchers at the Institute of Assembly Technology (match) of Leibniz Universität Hannover are currently developing a structural enhancement for existing parallel robots. The structural enhancement, a serial wrist axis structure, is actuated via Bowden control cables. The actuators are decoupled from the moving robot structure.
There are two advantages: Firstly, heavy actuators do not have to be moved along with the robot structure. In contrast to previous commercial solutions, mass is reduced considerably and dynamics is increased. Secondly, the prototype can be mounted to any robot structure. Thanks to the modular design concept, existing assembly cells can be enhanced easily.