Although the deep sea is still largely unexplored, it is becoming increasingly important for researchers and entrepreneurs. On the one hand, with regard to natural disasters, environmental pollution, and as an element of the global carbon cycle in connection with climate change – on the other hand, there is growing interest in ways to extract fossil fuels, mineral raw materials, and precious metals.
Marine robotics plays a significant role in all these areas of interest. It is concerned with developing of autonomous, deep-sea capable robots to provide insights into this hard-to-reach habitat.
match and GEOMAR develop controllable suction sampler for diving robots
This motivation led to a collaboration between the Institute of Assembly Technology (match) at Leibniz University Hannover and the Helmholtz Centre for Ocean Research Kiel (GEOMAR). The project, which started in November 2022, aims to combine the match’s accumulated experience in soft robotics and GEOMAR’s long-standing expertise in marine robotics.
The scientists want to equip already existing diving robots with a controllable suction device, which – compared to existing solutions – can enable fast and flexible sampling on the seafloor. In addition, a turret system will increase the number of samples that can be taken.
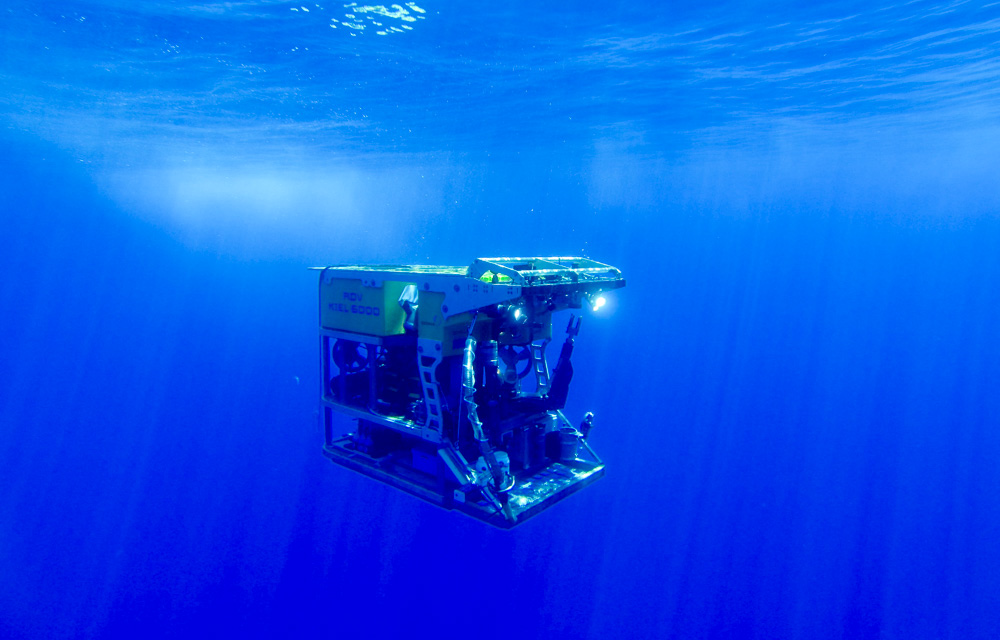
The ROV KIEL 6000, an unscrewed, remotely operated diving robot (see Figure 1), is used for sampling. Currently, the robot is equipped with a rigid hydraulic robotic arm to take samples from the seafloor using a passive suction sampler. However, this robotic arm is severely limited in its range and mobility.
Objectives: Accelerated sample collection, more cost-effective research deployments
Accelerated sampling in combination with a novel revolver sample container would significantly reduce the cost of research missions. For this, the actuated suction sampler must be at least 1.5 m long to reach the seafloor without the diving robot touching down on the bottom. A touchdown of the diving robot on the seafloor would stir up sediment and thus restrict the camera view. Furthermore, the suction sampler should withstand ocean currents of up to 5 m/s in any configuration and offer straightforward operation.
Challenges: The suction sampler must withstand pressure and saltwater
In addition to the darkness and the strong currents that can occur on the seabed, the high pressure, in particular, is a challenge for the development of the system. The plan is for the suction sampler of the diving robot to operate at a depth of up to 6000 m and thus have to withstand a pressure of 600 bar. To achieve this, the entire system must be pressure-neutral, and all materials used must therefore be incompressible and free of air pockets.
Since metals corrode very quickly in salt water, the suction sampler will be made mainly of plastic and silicone. This has the additional advantage that the overall weight of the submersible robot is not significantly increased by equipping it with the suction sampler, and the suction sampler is virtually buoyancy-neutral.
Hydraulic actuation with seawater is provided for the suction sampler. On the one hand, pneumatic actuation, which is used in most soft robots, is impossible due to the high ambient pressure. On the other hand, classic hydraulic oil cannot be used as a pressure medium, as this would pose a risk to the environment if the system were damaged.
Future vision: Soft marine robotics for exploring the world’s oceans
The emerging field of soft marine robotics offers unique opportunities to develop new methods for discovering and exploring the depths of the world’s oceans.
What is unique about the project presented here is that it is not just a matter of developing a concept, but a system that can be used in practice, combined with various diving robots and adapted modularly to the appropriate research missions.
Before the prototype can be developed and tested, however, fundamental studies must first be conducted. This includes the question of how the advantages of soft robotics (in the air) can be used underwater – but also what difficulties arise when adapting soft robotics concepts for the deep sea and how these can be solved.