Obwohl die Tiefsee noch weitgehend unerforscht ist, gewinnt sie zunehmend an Bedeutung. Einerseits im Hinblick auf Naturkatastrophen, Umweltverschmutzung und als Element des globalen Kohlenstoffkreislaufs im Zusammenhang mit dem Klimawandel – andererseits wächst das Interesse an Möglichkeiten zur Gewinnung von fossilen Brennstoffen, mineralischen Rohstoffen und Edelmetallen.
Die Marinerobotik spielt eine große Rolle in all diesen Interessensgebieten. Sie beschäftigt sich mit der Entwicklung autonomer, tiefseetauglicher Roboter, um Einblicke in diesen schwer erreichbaren Lebensraum geben können.
match und GEOMAR entwickeln steuerbaren Sauger für Tauchroboter
Aus dieser Motivation heraus entstand eine Zusammenarbeit zwischen dem Institut für Montagetechnik (match) der Leibniz Universität Hannover und dem Helmholtz-Zentrum für Ozeanforschung Kiel (GEOMAR). In dem im November 2022 gestarteten Projekt soll die bereits gesammelte Erfahrung des match im Bereich der Softrobotik und die langjährige Expertise des GEOMAR zum Thema Marine Robotik miteinander verknüpft werden.
Die Wissenschaftler:innen wollen bereits existierende Tauchroboter mit einem steuerbaren Sauger ausstatten, welcher eine – im Vergleich zu existierenden Lösungen – schnelle und flexible Probenentnahme am Meeresboden ermöglichen kann. Zusätzlich soll durch ein Revolversystem die Anzahl von Proben erhöht werden, die genommen werden können.
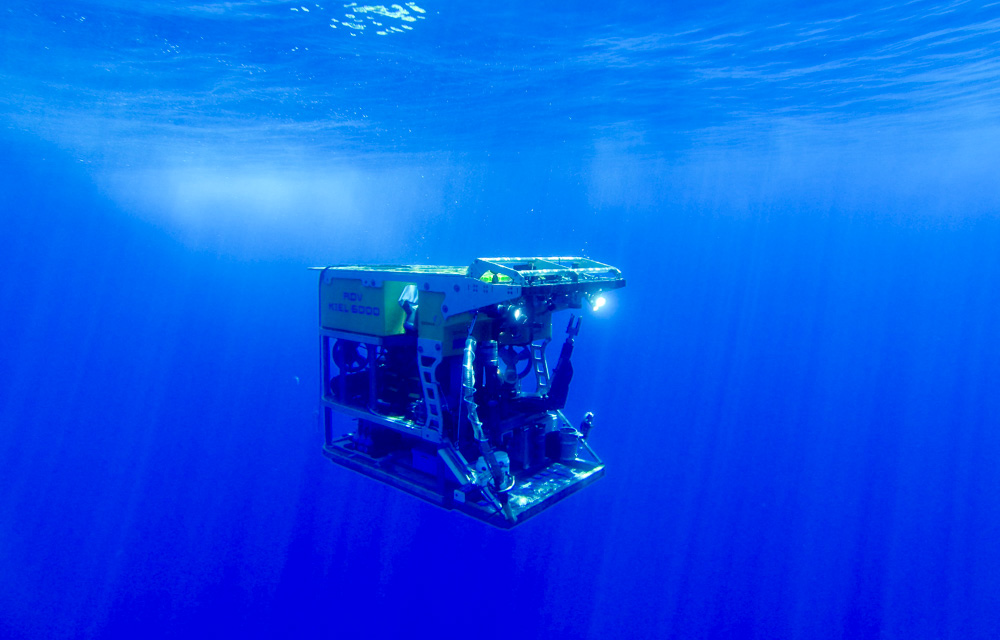
Für die Probenentnahme wird das ROV KIEL 6000 genutzt, ein unbemannter ferngesteuerter Tauchroboter (siehe Bild 1). Aktuell ist der Roboter mit einem rigiden hydraulischen Roboterarm ausgestattet, welcher mit einem passiven Sauger Proben vom Meeresboden nehmen kann. Dieser Roboterarm ist allerdings stark eingeschränkt in seiner Reichweite und Beweglichkeit.
Ziele: Beschleunigte Probenentnahme, kostengünstigere Forschungseinsätze
Die beschleunigte Probenentnahme in Kombination mit einem neuartigen Revolver-Probenbehälter würde die Kosten von Forschungseinsätzen deutlich senken. Hierfür ist es notwendig, dass der aktuierte Sauger mindestens 1,5 m lang ist, damit der Meeresboden erreicht werden kann, ohne dass der Tauchroboter auf dem Boden aufsetzt. Ein Aufsetzen des Tauchroboters auf den Meeresboden würde Sediment aufwirbeln und dadurch die Kamerasicht einschränken. Des Weiteren sollte der Sauger Meeresströmungen von bis zu 5 m/s in jeder Konfiguration standhalten können und eine leichte Bedienung bieten.
Herausforderungen: Der Sauger muss Druck und Salzwasser standhalten
Neben der Dunkelheit und den starken Strömungen, die am Meeresboden auftreten können, ist vor allem der hohe Druck eine Herausforderung für die Entwicklung des Systems. Geplant ist, dass der Sauger des Tauchroboters in einer Tiefe von bis zu 6000 m operieren soll und damit einem Druck von 600 bar standhalten muss. Dafür muss das gesamte System druckneutral sein. Alle verwendeten Materialien müssen somit inkompressibel und frei von Lufteinschlüssen sein.
Da Metalle im Salzwasser sehr schnell korrodieren, wird der Sauger größtenteils aus Kunststoff und Silikon gefertigt werden. Das hat zusätzlich den Vorteil, dass das Gesamtgewicht des Tauchroboters durch die Ausstattung mit dem Sauger nicht signifikant erhöht wird und der Sauger nahezu auftriebsneutral ist.
Für den Sauger ist eine hydraulische Aktuierung mit Meerwasser vorgesehen. Einerseits ist eine pneumatisch Aktuierung, welche bei den meisten Softrobotern Verwendung findet, aufgrund des hohen Umgebungsdrucks nicht möglich. Andererseits kann klassisches Hydrauliköl nicht als Druckmedium verwendet werden, da dies, sollte das System beschädigt werden, Gefahren für die Umwelt mit sich bringt.
Zukunftsvision: Marine Softrobotik zur Erforschung der Weltmeere
Das im Entstehen begriffene Gebiet der marinen Softrobotik bietet einzigartige Möglichkeiten zur Entwicklung neuer Methoden zur Entdeckung und Erforschung der Tiefen der Weltmeere.
Das Besondere an dem hier vorgestellten Projekt ist, dass es nicht nur darum geht, ein Konzept zu entwickeln, sondern ein in der Praxis nutzbares System, welches mit verschiedenen Tauchrobotern kombiniert und modular den entsprechenden Forschungseinsätzen angepasst werden kann.
Bevor der erste Prototyp entwickelt und getestet werden kann, müssen jedoch zunächst grundlegende Studien durchgeführt werden. Dazu gehört die Frage, wie die Vorteile der Softrobotik (an der Luft) unter Wasser genutzt werden können – aber auch, welche Schwierigkeiten bei der Adaption der Softrobotik-Konzepte für die Tiefsee auftreten und wie diese gelöst werden können.