From car chassis to airplane wings to rotor blades: Even large and complex objects must be transported in production if the machines required for assembly are location-bound. Currently, specially manufactured transport machines are used for this purpose. This makes such a transport process time-consuming and cost-intensive. In the future, mobile robotics will optimize the transport process.
The Institute of Assembly Technology (match) has been researching the field of mobile robotics for several years. At the match, mobile robot platforms are used for this purpose (see Figure 1), each equipped with a robot arm (see Figure 2). The mobile robots used can thus independently pick up objects up to a hardware-dependent maximum weight and place them on the mobile robot platform.
However, if particularly bulky objects are to be transported, several mobile robots must act together and lift and move the object jointly.
Hurdles in the cooperation of several mobile robots
Currently, match is researching the field of mobile robotics for cooperative object transport of heavy or complex objects. For this, several mobile robots must move together at a fixed distance from each other. To master the collective object transport, several problems have to be considered:
- The individual mobile robots must communicate with each other to learn the respective position of the other mobile robots. This requires a robust network to enable the emerging data stream.
- A monitoring unit is required to monitor and control the individual mobile robots during object transport. The tasks of this supervising unit include, for example, the selection of the mobile robots participating in the object transport or the determination of the arrangement of the mobile robots in the formation.
- During object transport, it is imperative to maintain the distances between the individual mobile robots. Even minimal deviations introduce strong forces into the transported object, which would lead to deformation or destruction of the object.
So a lot of research and development is still needed to make the teamwork of the mobile robots work.
Path planning for the formation of mobile robots
In addition to the previously mentioned problems of cooperative object transport, the formation does not know the path that must be followed to get from a starting position to a target position. A so-called path planning algorithm often determines this path. Generally, these algorithms determine a path that is either particularly short, time-optimal or energy-saving.
At the match, trajectory planning algorithms have been developed to solve this problem by allowing a formation to navigate from a starting position to a target position. In doing so, the formation can consist of any number of mobile robots that can adopt any geometric arrangement. However, the path of the formation must be optimized for several criteria before use. First, a mobile robot platform cannot perform lateral motion due to its non-holonomic drive. Second, jumps in the trajectory must be avoided so as not to generate jerky changes during travel.
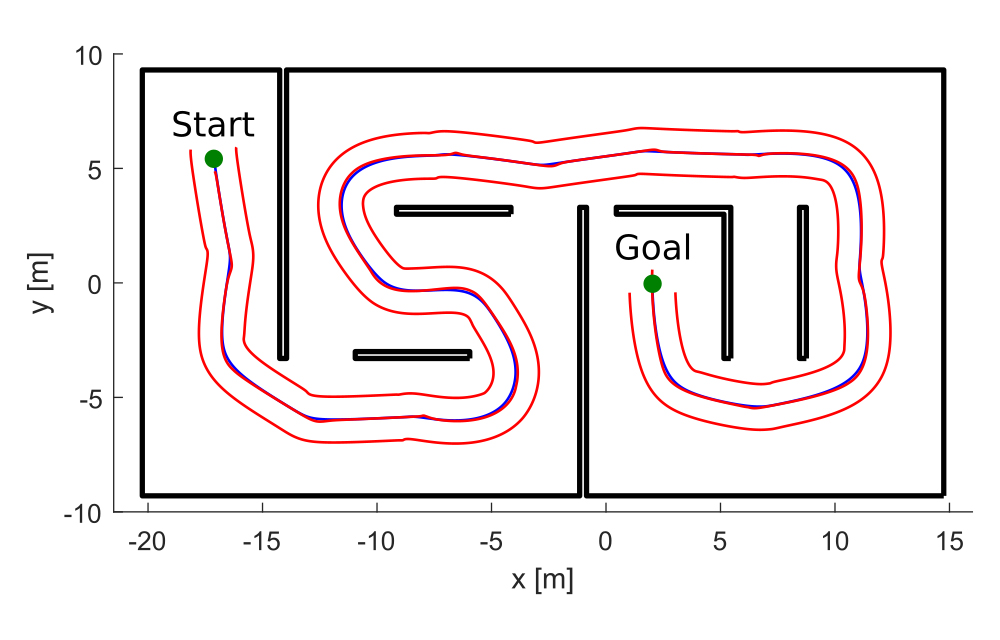
Subsequently, it is possible to derive the trajectories of the individual mobile robots from the motion of the formation so that they have the exact distances to each other at all times (see Figure 3).
New possibilities for mobile robotics in the SCALE research center
Due to the spatial conditions, it is currently only possible to a limited extent at the match to test such path planning algorithms in reality, which involve formations with more than three robot platforms. However, this is to change in the future with the SCALE research center. Launched in 2019, the build is scheduled for completion in 2022 and will provide new opportunities for mobile robotics.
Under the SCALE umbrella, 14 institutes have joined forces to investigate innovative research fields in the field of scalable production. Among them is mobile robotics. New arrangements can always be formed from different numbers of mobile robots. These robot formations can be used universally and can be dynamically adapted to specific processes. In this way, the mobile robots used will be able to handle numerous research tasks in SCALE in the future.