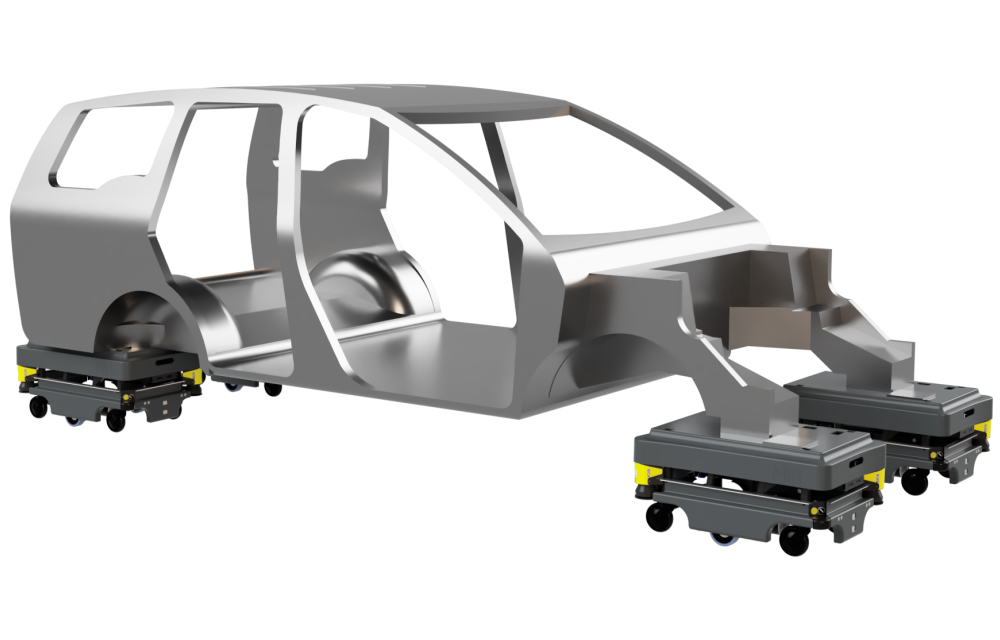
Vom Autochassis über die Flugzeugtragfläche bis zum Rotorblatt: Auch große und komplexe Objekte müssen in der Produktion transportiert werden, sofern die benötigten Maschinen zur Montage ortsgebunden sind. Aktuell werden dafür spezialangefertigte Transportmaschinen genutzt. Dadurch ist solch ein Transportprozess aufwendig und kostenintensiv. Zukünftig soll die mobile Robotik den Transportprozess optimieren.
Das Institut für Montagetechnik (match) forscht seit mehreren Jahren im Bereich der mobilen Robotik. Am match werden hierfür mobile Roboterplattformen verwendet (siehe Bild 1), die jeweils mit einem Roboterarm ausgestattet wurden (siehe Bild 2). Die verwendeten mobilen Roboter haben somit die Möglichkeit, Gegenstände bis zu einem hardwarebedingten Maximalgewicht selbstständig aufzuheben und auf der mobilen Roboterplattform abzulegen.
Falls jedoch besonders sperrige Gegenstände transportiert werden sollen, ist es notwendig, dass mehrere mobile Roboter miteinander agieren und den Gegenstand gemeinsam heben und bewegen.
Hürden bei der Kooperation mehrerer mobiler Roboter
Aktuell forscht das match im Bereich der mobilen Robotik zum kooperativen Objekttransport von schweren oder komplexen Gegenständen. Hierfür müssen sich mehrere mobile Roboter gemeinschaftlich mit einem festen Abstand zueinander bewegen. Zur Bewältigung des kooperativen Objekttransports müssen verschiedene Problemstellungen beachtet werden:
- Die einzelnen mobilen Roboter müssen miteinander kommunizieren, um die jeweilige Position der anderen mobilen Roboter zu erfahren. Dafür ist ein leistungsfähiges Netzwerk notwendig, um den aufkommenden Datenstrom zu ermöglichen.
- Eine überwachende Einheit ist notwendig, welche die einzelnen mobilen Roboter während des Objekttransports überwacht und steuert. Zu den Aufgaben dieser überwachenden Einheit zählen beispielsweise die Auswahl der am Objekttransport teilnehmenden mobilen Roboter oder die Bestimmung der Anordnung der mobilen Roboter in der Formation.
- Während des Objekttransports ist es zwingend erforderlich, die Abstände der einzelnen mobilen Roboter zueinander einzuhalten. Bereits durch minimale Abweichungen werden starke Kräfte in das transportierte Objekt eingeleitet, was zur Verformung oder Zerstörung des Gegenstands führen würde.
Damit die Teamarbeit der mobilen Roboter funktioniert, ist also noch viel Forschung und Entwicklung erforderlich.
Bahnplanung für Formation mobiler Roboter
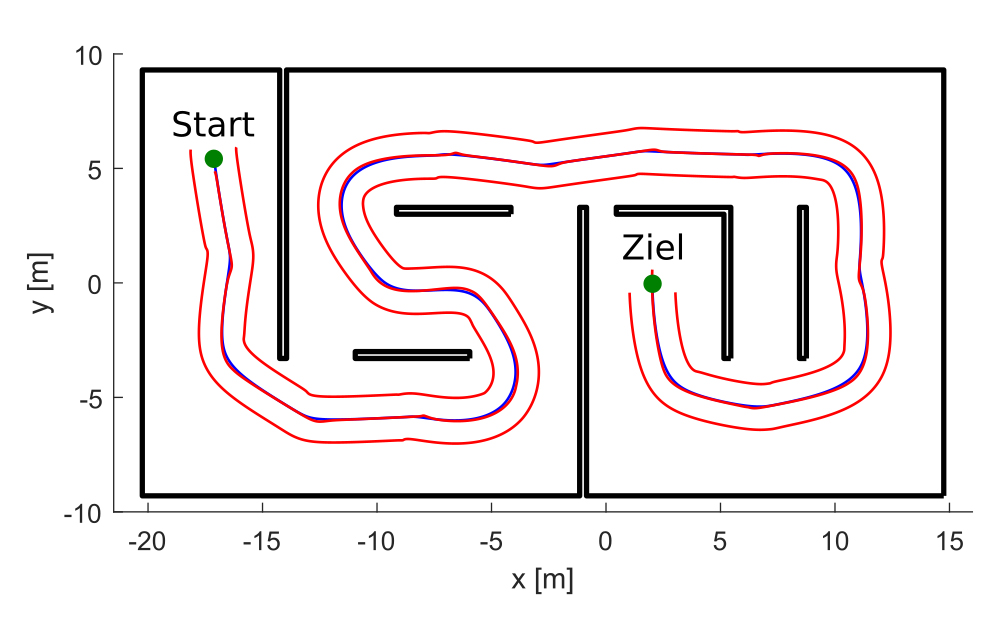
Neben den zuvor genannten Problemstellungen des kooperativen Objekttransports ist der Formation nicht bekannt, welcher Weg verfolgt werden muss, um von einer Start- zu einer Zielposition zu gelangen. Dieser Weg wird häufig durch einen sogenannten Bahnplanungsalgorithmus bestimmt. Generell ermitteln diese Algorithmen eine Bahn, welche entweder besonders kurz, zeitoptimal oder energiesparsam ist.
Am match wurden zur Lösung dieser Problemstellung Bahnplanungsalgorithmen entwickelt, die es einer Formation ermöglichen, von einer Start- zu einer Zielposition zu navigieren. Dabei kann die Formation aus einer beliebigen Anzahl an mobilen Robotern bestehen, die jede geometrische Anordnung einnehmen können. Die Bahn der Formation muss jedoch vor der Anwendung auf verschiedene Kriterien optimiert werden. Zum einen kann eine mobile Roboterplattform aufgrund ihres nicht-holonomen Antriebs keine seitliche Bewegung durchführen. Zum anderen müssen Sprünge in der Bahn vermieden werden, um keine ruckartigen Änderungen während der Fahrt zu erzeugen.
Anschließend ist es möglich von der Bewegung der Formation die Bahnen der einzelnen mobilen Roboter abzuleiten, damit diese zu jedem Zeitpunkt die gleichen Abstände zueinander aufweisen (siehe Bild 3).
Neue Möglichkeiten für die mobile Robotik im Forschungsbau SCALE
Aufgrund der räumlichen Bedingungen ist es aktuell am match nur bedingt möglich, solche Bahnplanungsalgorithmen in der Realität zu testen, die eine Formationen mit mehr als drei Roboterplattformen beinhalten. Dies soll sich jedoch zukünftig mit dem Forschungsbau SCALE ändern. Der 2019 gestartete Bau soll im Jahr 2022 fertig gestellt werden und der mobilen Robotik neue Möglichkeiten verschaffen.
Unter dem Dach von SCALE haben sich 14 Institute zusammengeschlossen, um innovative Forschungsfelder auf dem Gebiet der skalierbaren Produktion zu untersuchen. Darunter fällt auch die mobile Robotik. Aus unterschiedlichen Anzahlen von mobilen Robotern lassen sich immer neue Anordnungen bilden. Diese Roboterformationen sind universell einsetzbar und können dynamisch auf spezifische Prozesse angepasst werden. So lassen sich mit den eingesetzten mobilen Robotern in Zukunft zahlreiche Forschungsaufgaben in SCALE bewältigen.