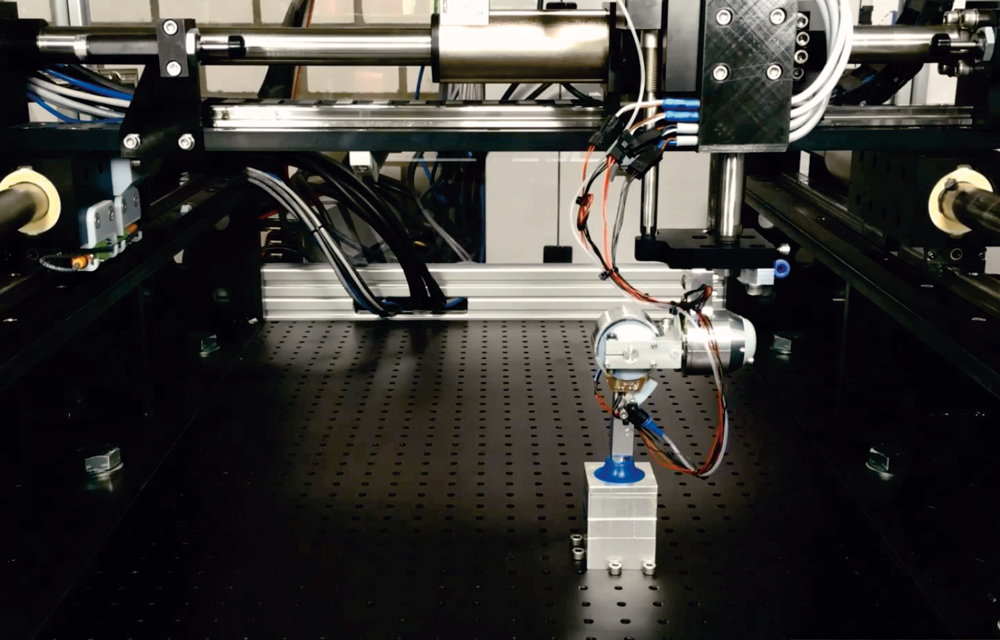
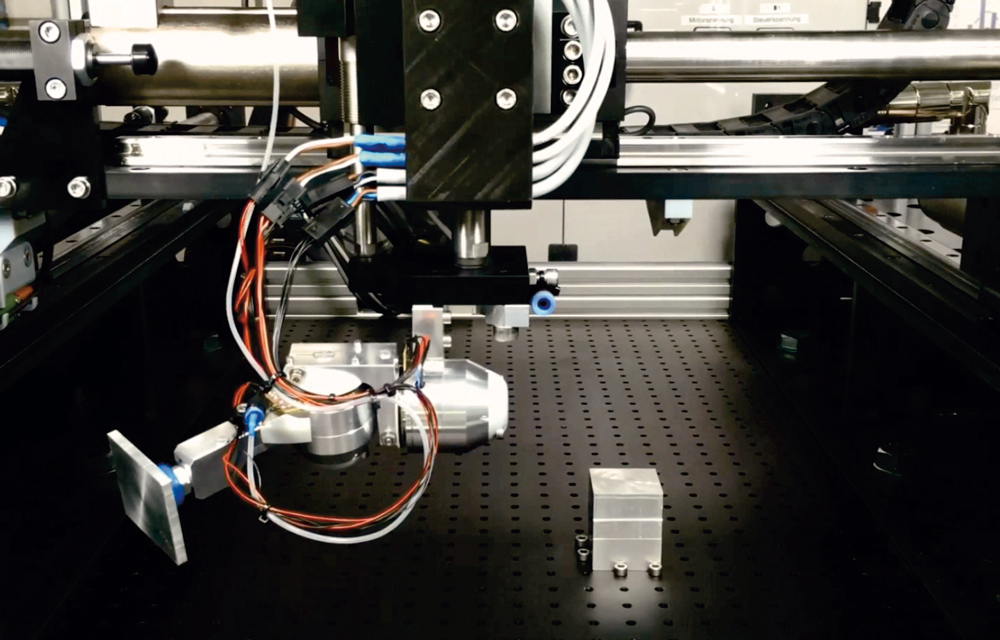
Parallel robots are handling systems used in assembly processes. Aside from high-speed movement patterns and short process times, they are mostly quite inflexible. To provide additional mobility, the parallel structure is often enhanced by an additional rotation axis. The advantage: A product that is picked up can be placed in a new location and oriented differently. In existing systems, the rotation axis has to be actuated separately – making the systems complex, heavy and expensive.
Researchers of the Institute of Assembly Technology (match) of Leibniz Universität Hannover are working on an alternative. Their research is focused on orientation systems using passive rotary joints which can be integrated as a gripper module into existing handling systems. This is called an underactuated mechanical system, because it has a lower number of actuators than degrees of freedom. Fewer actuators mean lower weight and cost. Moreover, the design effort is lower compared to conventional fully actuated equivalent systems.