Although the automation of industrial trucks offers many advantages in intralogistics, companies often still rely on manually operated industrial trucks such as forklifts or pallet trucks. The main reasons for this are the high level of flexibility and adaptability with regard to different load carriers and working environments. As things stand, automated industrial trucks can transport load carriers independently in the internal logistics environment. However, automated load handling requires sufficiently precise positioning and alignment of the load carriers in line with the process.
Goal: Transferring human skills to industrial trucks
Picking up hard-to-reach and complexly arranged load carriers presents challenges even for qualified drivers and requires experience in picking up loads. Due to their speed of action, comprehension and practice, humans are still superior to automated industrial trucks.
In the LernFFZ research project, the skills of qualified drivers are to be extracted for the first time and transferred to an automated industrial truck with the help of suitable machine learning methods. To achieve this goal, the implicit knowledge of experienced drivers during the driving task is recorded and formalized using suitable sensors. On this basis, an AI model is trained with the recorded data and then transferred to the automated industrial truck. This new control approach should enable the industrial truck to autonomously pick up load carriers positioned anywhere in the room.
What sets LernFFZ apart from other approaches?
Current developments in the field of automated intralogistics focus on the expansion of autonomous mobile robots (AMR) and driverless transport systems (AGV) by combining AI methods with both innovative sensors such as 3D depth imaging color cameras and flexible path planning algorithms. In contrast to this direction, which is currently dominating research, LernFFZ chooses the alternative approach and sets the basis for innovation on manually operated industrial trucks. While explicit knowledge is used in the existing solution approaches for the realization of an autonomous system, implicit knowledge is to be transferred for the first time in LernFFZ.
These intralogistics tasks are at stake
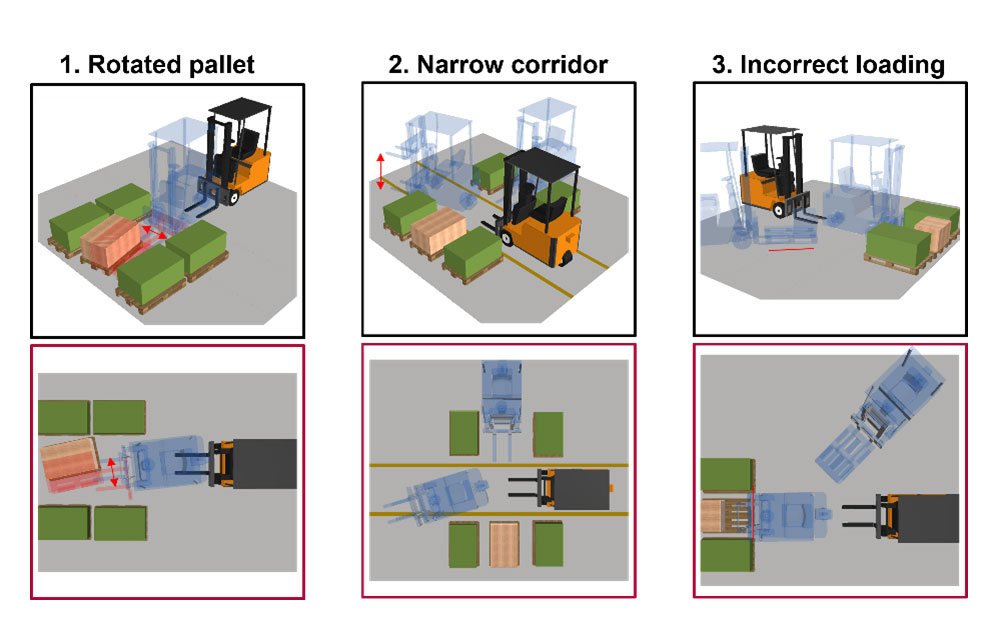
Fully automated, in-house goods transportation still requires clearly defined routes and storage areas. In situations where high flexibility is paramount or no clearly defined storage areas can be identified due to the process, manually operated industrial trucks must take over. Undefined storage areas occur in incoming goods, for example, where the exact position of the individual load carriers is not known. A high degree of flexibility is required in narrow storage aisles, for example, where no direct shunting path can be described to pick up a load carrier. Picking up unevenly loaded load carriers is another challenge that requires the driving behavior to be adapted. The driving behavior of qualified manually industrial truck operators to solve these situations is recorded in the LernFFZ project using various methods.
How can human experience be harnessed?
The LernFFZ project uses a modified manual industrial truck to record the behavior of drivers in different situations. This is equipped with a variety of sensors such as RGB-D cameras and lidar sensors for environment recognition and detection. It also uses industrial truck-specific information such as steering angle and speed as well as the current position in space. In addition to recording the driving data on the real vehicle, scientists at IPH – Institut für Integrierte Produktion Hannover gGmbH are also creating a digital twin of the industrial truck in a simulation environment. In conjunction with a physical simulator, this enables the flexible recording of synthetic driving data in a laboratory-like environment. A wide variety of situations and tasks can be easily recreated in the simulation environment and presented to the drivers.
The focus is also on specifying and defining suitable interfaces for the sensors used and the input and output devices. This is particularly important for the seamless fusion of synthetic and real data into a common data set. For this purpose, the Robotics Operating System (ROS) is used, which allows a uniform definition of interfaces in the form of a standardized message protocol due to its modularity. The aim is to be able to exchange the digital twin and the real industrial truck with each other at any time.
Transferring knowledge to the automated FFZ
By merging the real and synthetic driving data, a complex data set is created that reflects the expert knowledge and serves as the basis for training an AI model. This AI model will then enable the automated industrial truck to pick up load carriers autonomously. Scientists at the Institute of Transport and Automation Technology (ITA) at Leibniz University Hannover are working on the selection and adaptation of suitable machine learning algorithms.
Possible approaches include supervised learning, such as behavioral cloning, in which a model learns human behavior directly from sample data in order to perform the same actions in a given environment. Alternatively, methods from reinforcement and imitation learning can be combined to create inverse reinforcement learning. In this case, a reward function is first learned from the recorded example data in order to subsequently learn a rule for the underlying driving task with the help of an agent. From this, the implicit goals of the expert can be modeled and reproduced.
In both cases, the digital twin is used in the simulation environment to test and evaluate the trained AI models before they are transferred to the real automated industrial truck. Standardized interfaces make it possible to exchange the application environment (digital twin or real industrial truck) without additional adaptation effort.
In this context, however, the so-called sim-to-real transfer represents a challenge in the LernFFZ project. In this process, this means transferring the AI models that have been pre-trained and evaluated in a simulation environment to the real, physical system.
An important contribution to the shortage of skilled workers
In the LernFFZ project, scientists from the ITA and IPH are conducting research together with numerous industrial companies, including Still GmbH and software developer 3++.
The chosen approach of mapping the expert knowledge of qualified industrial truck operators in a model enables automated industrial trucks to solve even complex processes independently. This directly counteracts the constantly growing shortage of skilled workers. In addition, this approach enables automated industrial trucks to learn human behavior in safety-critical situations as well as picking tasks.