Obwohl die Automatisierung von Flurförderzeugen (FFZ) in der Intralogistik viele Vorteile bietet, setzen Unternehmen häufig immer noch auf manuell geführte FFZ wie zum Beispiel Gabelstapler oder Hubwagen. Die Gründe liegen hauptsächlich in der hohen Flexibilität und Anpassungsfähigkeit in Bezug auf verschiedene Ladungsträger und Arbeitsumgebungen. Nach aktuellem Stand können automatisierte FFZ Ladungsträger selbstständig in der innerbetrieblichen Logistikumgebung transportieren. Allerdings ist für die automatisierte Lastaufnahme eine ausreichend genaue, auf den Prozess abgestimmte Positionierung und Ausrichtung der Ladungsträger erforderlich.
Ziel: Menschliche Fähigkeiten auf Flurförderzeuge übertragen
Das Aufnehmen von schwer erreichbaren und komplex angeordneten Ladungsträgern stellt selbst qualifizierte Fahrer*innen vor Herausforderungen und erfordert Erfahrung bei der Lastaufnahme. Durch Ihre Handlungsschnelligkeit, Auffassungsgabe und Übung sind Menschen den automatisierten FFZ noch überlegen.
Im Forschungsprojekt LernFFZ sollen erstmalig die Fähigkeiten qualifizierter Fahrer*innen extrahiert und mit Hilfe geeigneter Maschine-Learning-Methoden auf ein teilautomatisiertes FFZ übertragen werden. Für dieses Ziel wird das implizite Wissen geübter Fahrer*innen während der Fahraufgabe mittels geeigneter Sensoren aufgenommen und formalisiert. Auf dieser Grundlage wird ein KI-Modell mit den aufgenommenen Daten trainiert und anschließend auf ein teilautomatisiertes FFZ übertragen. Dieser neue Steuerungsansatz soll das FFZ befähigen, beliebig im Raum positionierte Ladungsträger autonom aufzunehmen.
Was LernFFZ von anderen Ansätzen unterscheidet
Aktuelle Entwicklungen im Bereich der automatisierten Intralogistik setzen auf die Erweiterung von autonomen mobilen Robotern (AMR) und fahrerlosen Transportsystemen (FTS), durch die Kombination von KI-Methoden sowohl mit neuartigen Sensoren wie 3D-Tiefenbildfarbkameras, als auch mit flexiblen Pfadplanungsalgorithmen. Im Gegensatz zu dieser aktuell in der Forschung stark dominierenden Richtung wählt LernFFZ den alternativen Ansatz und setzt die Innovationsbasis bei dem manuellen FFZ. Während in den vorhandenen Lösungsansätzen explizites Wissen für die Realisierung eines autonomen Systems genutzt wird, soll in LernFFZ erstmalig implizites Wissen übertragen werden.
Um diese intralogistischen Aufgaben geht es
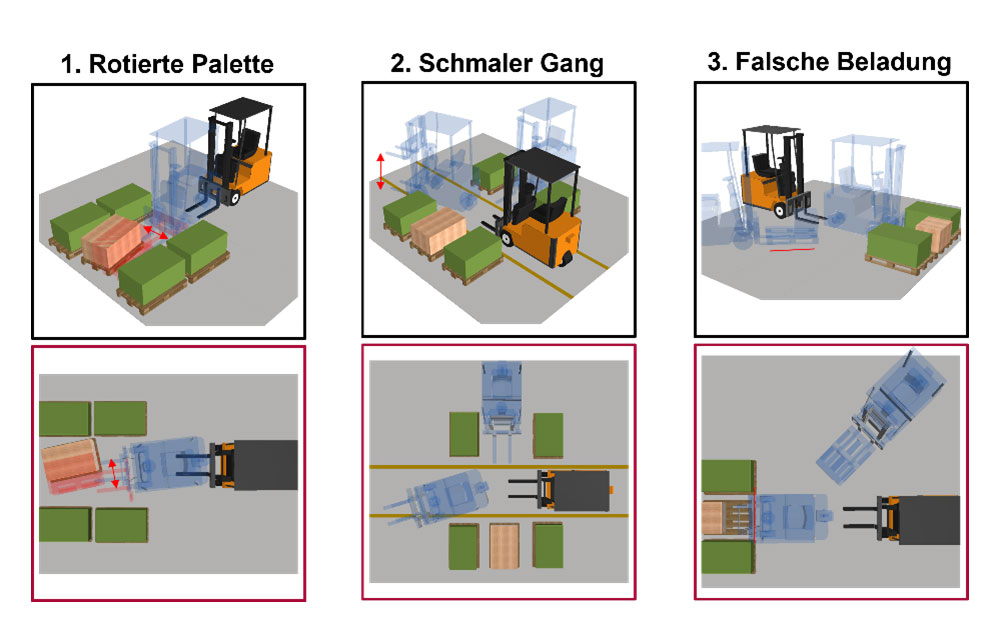
Der vollautomatisierte, innerbetriebliche Warentransport setzt bis heute klar definierte Fahrwege und Lagerbereiche voraus. In Situationen, wo hohe Flexibilität im Vordergrund steht oder aufgrund des Prozesses keine fest definierten Lagerbereiche ausgemacht werden können, müssen manuell geführte FFZ übernehmen. Undefinierte Lagerbereiche treten beispielsweise im Wareneingang auf, wo die genaue Position der einzelnen Ladungsträger nicht bekannt ist. Hohe Flexibilität wird beispielsweise in schmalen Lagergänge vorausgesetzt, in denen zur Aufnahme eines Ladungsträgers kein direkter Rangierweg beschrieben werden kann. Das Aufnehmen ungleich beladener Ladungsträger stellt eine weitere Herausforderung dar, die eine Anpassung des Fahrverhaltens erfordert. Das Fahrverhalten qualifizierter FFZ-Bediener*innen zum Lösen dieser Situationen wird im Projekt LernFFZ mithilfe verschiedener Verfahren aufgenommen.
Wie kann menschliches Erfahrungswissen nutzbar gemacht werden?
Die Erfassung der Verhaltensweise von Fahrer*innen in den unterschiedlichen Situationen wird im Projekt LernFFZ mithilfe eines modifizierten Schubmaststaplers erforscht. Ausgestattet ist dieser mit einer Vielzahl von Sensoren wie RGB-D Kameras und Lidarsensoren zur Umfelderkennung und -erfassung. Zurückgegriffen wird ebenfalls auf die staplerspezifischen Informationen wie Lenkwinkel und Geschwindigkeit sowie die aktuelle Position im Raum. Neben der Aufnahme der Fahrdaten am realen Fahrzeug erstellen Wissenschaftler*innen des IPH – Institut für Integrierte Produktion Hannover gGmbH auch einen Digitalen Zwilling eines Schubmaststaplers in einer Simulationsumgebung. Dies ermöglicht in Verbindung mit einem physischen Simulator das flexible Aufnehmen synthetischer Fahrdaten in einer laborähnlichen Umgebung. Verschiedenste Situationen und Aufgabenstellungen können in der Simulationsumgebung einfach nachgebaut und den Fahrer*innen präsentiert werden.
Im Vordergrund stehen ebenfalls das Festlegen und Definieren von geeigneten Schnittstellen für die verwendete Sensorik und die Eingabe- und Ausgabegeräte. Dies ist insbesondere für die nahtlose Fusion der synthetischen und realen Daten zu einem gemeinsamen Datensatz von Bedeutung. Hierfür wird mithilfe des Robotik Operating Systems (ROS) gearbeitet, welches durch seine Modularität eine einheitliche Definition von Schnittstellen in Form eines standardisierten Nachrichtenprotokolls erlaubt. Ziel ist es, das simulierte und reale FFZ jederzeit gegeneinander austauschen zu können.
Übertragung des Wissens auf das automatisierte FFZ
Durch das Fusionieren der realen und synthetischen Fahrdaten entsteht ein komplexer Datensatz, der das Expertenwissen widerspiegelt und als Basis dient, um ein KI-Modell zu trainieren. Dieses KI-Modell wird das FFZ anschließend befähigen, Ladungsträger autonom aufzunehmen. Wissenschaftler*innen des Instituts für Transport- und Automatisierungstechnik (ITA) der Leibniz Universität Hannover beschäftigen sich mit der Auswahl und Adaption geeigneter Maschine-Learning-Algorithmen.
In Frage kommen Ansätze aus dem überwachten Lernen, wie das Behavioral Cloning, bei der ein Modell das menschliche Verhalten direkt aus Beispieldaten lernt, um gleiche Aktionen in einer gegebenen Umgebung auszuführen. Alternativ können Methoden aus dem Reinforcement und Imitation Learning zum Inverse Reinforcement Learning kombiniert werden. In diesem Fall wird zuerst aus den aufgenommenen Beispieldaten eine Belohnungsfunktion erlernt, um anschließend mithilfe eines Agenten eine Regel für die zugrunde liegende Fahraufgabe zu lernen. Daraus lassen sich die impliziten Ziele des Experten modellieren und reproduzieren.
In beiden Fällen dient der Digitale Zwilling in der Simulationsumgebung zur Erprobung und Evaluation der trainierten KI-Modelle, bevor diese auf das reale FFZ übertragen werden. Durch vereinheitlichte Schnittstellen gelingt ein Austausch der Anwendungsumgebung (Simulation oder reales FFZ) ohne zusätzlichen Anpassungsaufwand.
In Zusammenhang damit stellt der sogenannte Sim-to-Real Transfer im Projekt LernFFZ jedoch eine Herausforderung dar. In diesem Prozess bedeutet dies den Transfer der in einer Simulationsumgebung vortrainierten und evaluierten KI-Modelle auf das reale, physische System.
Ein wichtiger Beitrag zum Fachkräftemangel
Im Projekt LernFFZ forschen Wissenschaftler*innen des ITA und des IPH gemeinsam mit zahlreichen Industrieunternehmen, darunter die Still GmbH sowie der Softwareentwickler 3++.
Durch den gewählten Ansatz, das Expertenwissen von qualifizierten FFZ-Bedienern*innen in einem Modell abzubilden, werden FFZ befähigt auch komplexe Vorgänge selbstständig zu lösen. Das wirkt dem stetig wachsenden Fachkräftemangel direkt entgegen. Darüber hinaus lernen FFZ durch diesen Ansatz sowohl das menschliche Verhalten in sicherheitskritischen Situationen als auch Aufgaben im Bereich des Kommissionierens.