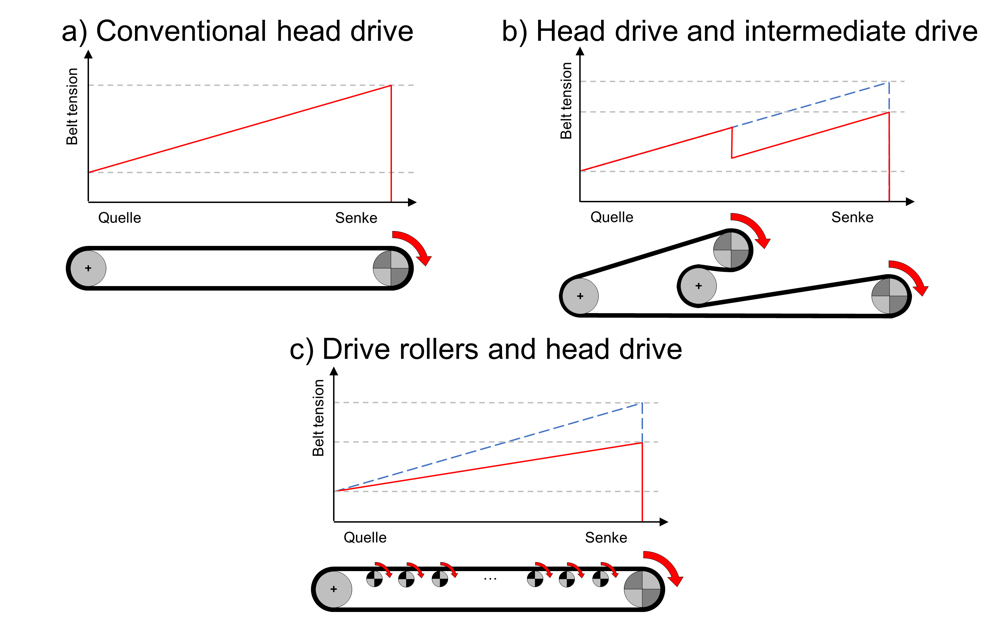
A large drive motor, usually at the head of the system, transmits the entire driving force into the conveyor belt – this is the current state of the art in drive technology for belt conveyors. In systems that are longer than ten kilometers or are very heavily loaded, intermediate drives are used which introduce additional driving forces into the conveyor belt along the conveyor route.
These punctual force introductions mean that the conveyor belt used requires a corresponding tensile strength to withstand the high loads. This is where current conveyor belts reach their technical and economic limits.
New drive concept
Scientists at the Institute for Transport and Automation Technology (ITA) are currently developing a novel drive concept. This breaks with the current approach of continuously increasing the driving force and tensile strength.
The aim of the new drive concept is to overcome the local movement resistances that occur, also by locally applied driving forces. For this purpose, idlers, which are classically only used for belt guidance, are equipped with their own drives in order to provide a distributed driving force over the entire length of the plant. The resulting belt tensile forces can be significantly reduced with this concept (see Figure 2).
Decentralized control
Decentralized control systems are often used where several tasks that can be separated from each other are to be executed simultaneously. In driverless transport systems, each vehicle has its own independent control system. With the new drive concept of drive rollers for belt conveyors, control is also decentralized. In this case, however, all drive rollers must perform a single task together – namely driving the belt conveyor system. Here the focus is on cooperative interaction.
In order for a single drive roller to be able to transmit a defined driving force to the conveyor belt, certain information is required: firstly, the local speed of the conveyor belt and secondly, a representation of the power transmission function. This function describes the relationship between the maximum driving force that can be transmitted by a single drive roller and the ambient conditions such as temperature, humidity and contact pressure between the belt and the roller.
Drive rollers must therefore be able to do more than just provide driving force – they must also be able to record information regarding local belt speeds and individual power transmission functions.
Optimization model
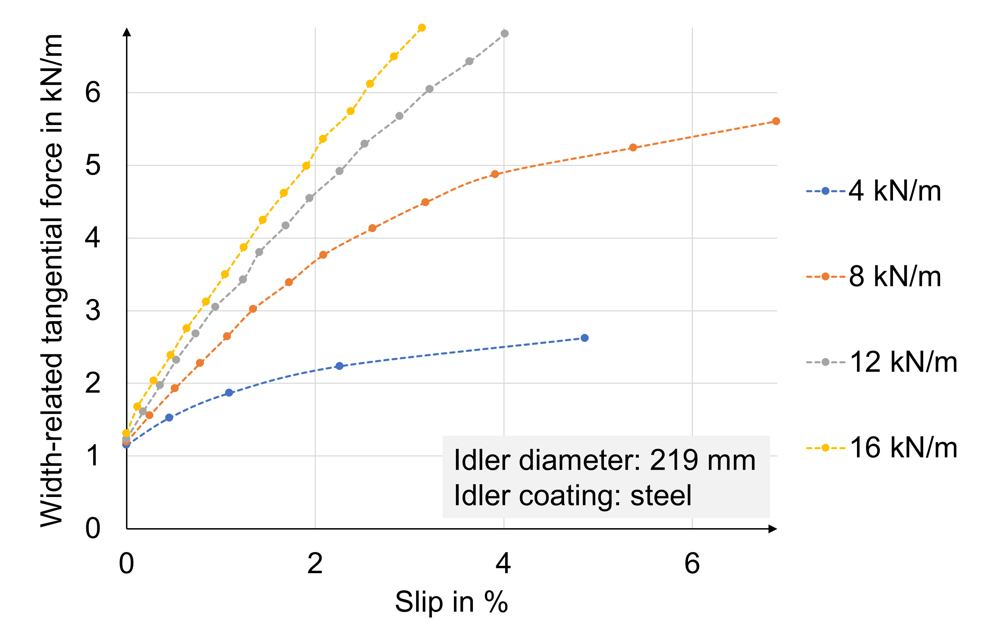
In addition to achieving and maintaining the specified target conveying speed, it is important to keep wear and tear of the belt conveyor system as low as possible. However, a conflict of objectives arises here, as the wear that occurs increases disproportionately to the transmitted driving force (see Figure 3).
Therefore, the scientists at ITA want to formulate an optimization model which aims to minimize the occurring slip. However, the secondary conditions of information provision and the sufficient provision of driving force must always be fulfilled. The special feature of this optimization model is that its solution is also decentralized by the individual controls of the drive rollers. An analytical solution procedure is used to increase flexibility and reactivity.
Within the belt of a conveyor system there are locally different strains which result from the attacking movement resistances. In addition to the fluctuation of the local belt speed, this also leads to locally different driving force requirements. The optimised and coordinated decentralized control of the individual drive rollers can thus enable targeted and wear-reduced plant operation.
Overcoming technical limits
By choosing a decentralized control concept based on a combination of adjacent drive rollers, the novel drive concept is scalable at will. If the number of drive rollers used is not limited, the current limitations of belt conveyors can also be overcome – namely the maximum system lengths and conveying capacities that are currently technically and economically feasible.
In addition to these advantages, drive rollers can open up new potentials in system design. For example, the use of drive rollers allows for smaller curve radii and larger inclines.