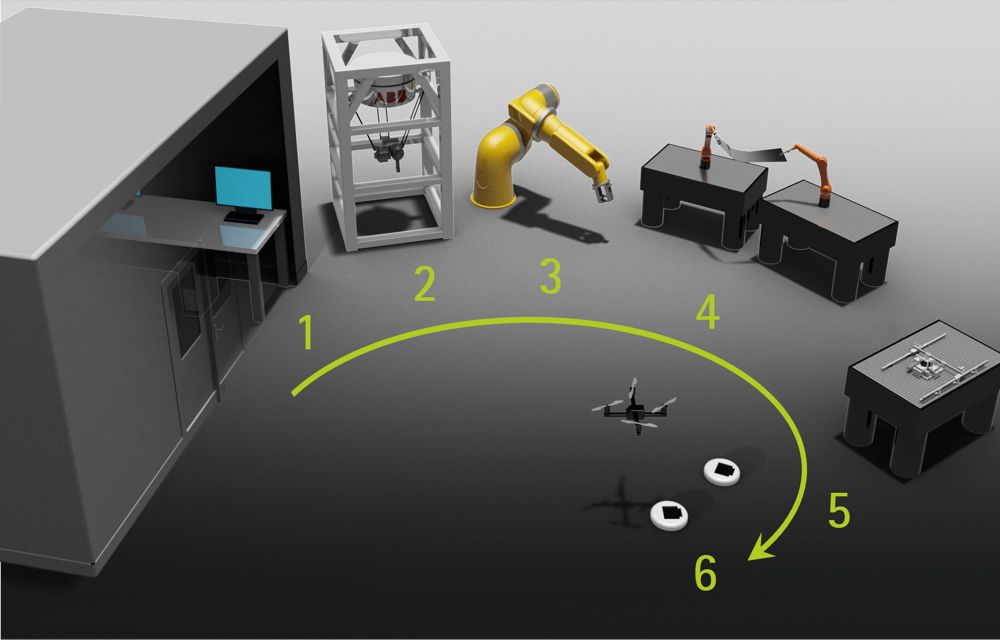
TX200, Qball und IRB360 heißen die neuen Kollegen am Institut für Montagetechnik (match): Die Roboter unterstützen ab sofort Forschung und Lehre. Für rund 300.000 Euro hat das neu gegründete Institut ein eigenes Versuchsfeld im Produktionstechnischen Zentrum Hannover (PZH) eingerichtet. Investiert wurde nicht nur in neue Maschinen – auch der Fußboden wurde modernisiert und ein abgetrennter Arbeitsraum für Studierende eingerichtet. Dort können sie in ruhiger Umgebung ihre Projekt- oder Abschlussarbeiten schreiben.
Das match erforscht Roboter für die Montage…
Kernstück des Versuchsfelds ist jedoch die Roboter-Mannschaft. Die Wissenschaftler am match arbeiten daran, Montageroboter immer weiter zu optimieren: Beispielsweise programmieren sie ihnen genug Feingefühl ein, damit sie auch empfindliche Elektronikprodukte montieren können. In einem DFG-Transferprojekt hat das match gemeinsam mit der ABB AG die Funktionen des Industrieroboters IRB360 FlexPicker erweitert. Für weitere Forschungsthemen und für die Lehre hat der Projektpartner ihnen den Roboter als Leihgabe zur Verfügung gestellt.
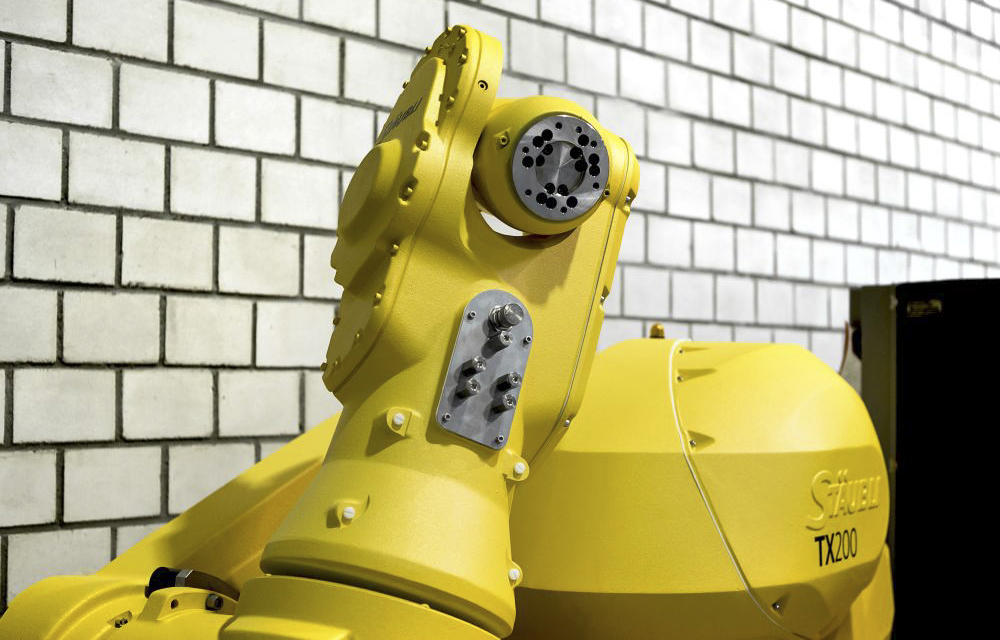
Den Vertikalknickarmroboter Stäubli TX200 hat das match wegen seiner hohen maximalen Traglast und der vielseitig einsetzbaren Peripherie-Schnittstellen beschafft. Die Wissenschaftler wollen damit neue Greifprinzipien erforschen – speziell auf dem Gebiet der Handhabung von großen Bauteilen mit formlabilen Strukturen. Zudem wollen sie Algorithmen entwickeln, mit denen sich Störeinflüsse kompensieren lassen.
…vermittelt Lehrinhalte praxisnah…
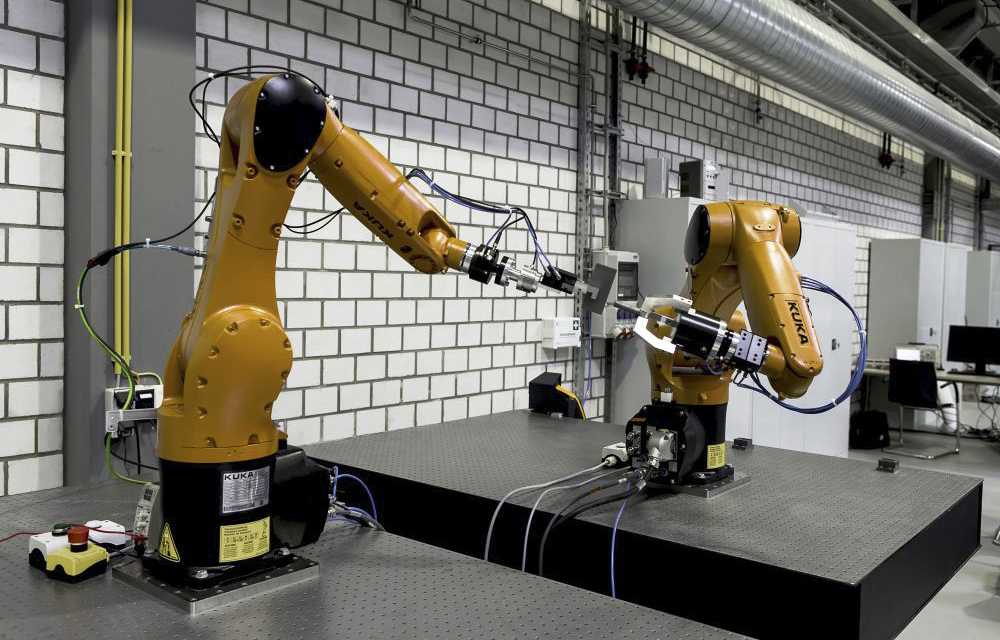
Zur praxisnahen Vermittlung der Lehrinhalte aus der Vorlesung „Industrieroboter für die Montagetechnik“ stehen am match jetzt zwei KUKA KR6 Agilus bereit. Sie können unterschiedlichste Sensorsignale verarbeiten – beispielsweise führen sie sensible Fügeoperationen mit Hilfe von Kraftsensoren aus oder lokalisieren Objekte im Raum mit Kamerasystemen.
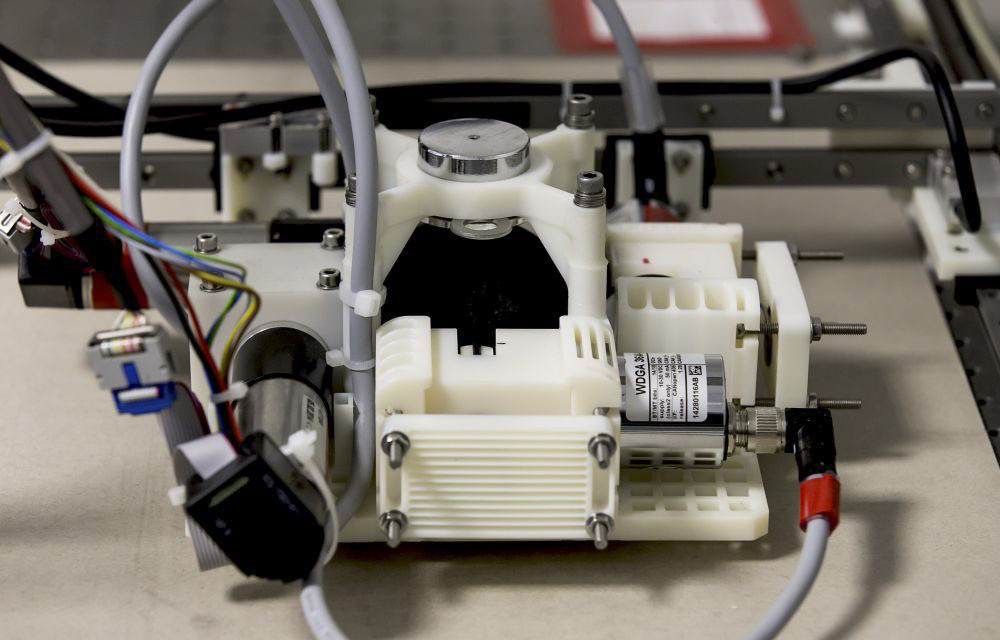
Ein omnidirektionales Transportsystem gehört ebenfalls zum neuen Versuchsfeld: Bei der Montage von großen und schweren Bauteilen eignen sich solche Systeme hervorragend zur Bereitstellung und Positionierung der zu montierenden Komponenten. Am match wird derzeit eine neuartige mobile Plattform mit redundanten Antriebseinheiten entwickelt. Die Forscher beschäftigen sich hier vor allem mit Kinematik und Konstruktion sowie Regelung und Bahnplanung, aber auch mit der Integration von 3D-Druckkomponenten.
…und bietet Abschlussarbeiten an
Mit den Robotersystemen Qbot und Qball der Firma Quanser werden Studierenden Inhalte zu den Themen „Mobile Robotik“ und „Kooperative Montage“ vermittelt. Die Qbots sind mobile Roboter mit Kamerasystem, Infrarotsensoren, Ultraschallsensoren, 3D-Magnetometern und einem drahtlosen Kommunikationsmodul. Der Qball, ein Quadrocopter, hat ein Datenerfassungs-System, ein drahtloses Kommunikationsmodul sowie ein Kamerasystem an Bord. Studierende können hier Abschluss- und Projektarbeiten schreiben – etwa über kamerageführte Montage, Hinderniserkennung oder die Koordination und Kooperation mehrerer mobiler Roboter.