3D printing in the construction industry could significantly improve working conditions and increase productivity. This is because additive manufacturing enables a high degree of automation, cost efficiency and design freedom. However, the construction site’s boundary conditions are significantly different from conventional 3D printing applications. First of all, the time-dependent material behaviour of fresh concrete, component design, and environmental influences prevent the pure scaling of existing printing processes.
To enable civil engineering application, adapted concepts have to be developed based on the aforementioned boundary conditions. To this end, the Institute of Assembly Technology (match) is developing path planning and control algorithms for additive manufacturing for industrial robots as part of subproject B04 of the Collaborative Research Centre TRR 277, which is funded by the German Research Foundation (DFG).
Adaptive path planning
In contrast to plastics or metals, concrete has a significantly delayed strength development. When using commercial path planning algorithms, this often leads to excessive flow of the material during the printing process. In extreme cases, this causes the printing process to fail, and the component must be discarded.
To increase process reliability, scientists at the match are developing adaptive path planning methods that explicitly take into account the dynamic material behaviour. Starting from an initial printing path, the path points and the process parameters are optimized based on finite element simulations. Two approaches are available for this purpose. On the one hand, the strand cross-section and the material application position are changed so that the desired shape is only achieved under the final load. Secondly, reducing the printing speed while taking into account the material volume flow increases the curing time and fosters the material strength. However, increasing the printing time must be limited in order to ensure sufficient interlayer strength, even for the large-scale components commonly used in construction.
Robots with an extended degree of freedom
The dimensions of components in the construction industry, however, not only require consideration in the context of path planning but also increase the necessary machine work area. At the match, an additional focus is therefore on the development of control algorithms that are capable of printing components in larger dimensions.
Industrial robots with an extended degree of freedom are suitable for this purpose. On the one hand, they enable the cost-effective realization of the necessary working space, and, on the other hand, collision avoidance with already printed component areas can be implemented. Also, free positioning and orientation of the material application become possible, allowing resource-saving, organic component designs to be manufactured – for example, as the results of topology optimization.
The match’s focus is on the development of algorithms that ensure a continuous path speed during the printing process and take into account additional constraints from collision avoidance to resolve the extended degree of freedom.
Process control
Utilizing mobile robots with an extended degree of freedom will additionally reduce transport emissions by manufacturing components on-site. The sensitivity of fresh concrete’s material properties to ambient temperature, mixing time, and humidity becomes a challenge here. To ensure consistent component quality, the match is investigating a material application control system. This is based on a model-based prediction of the material behaviour as a function of the pressure parameters.
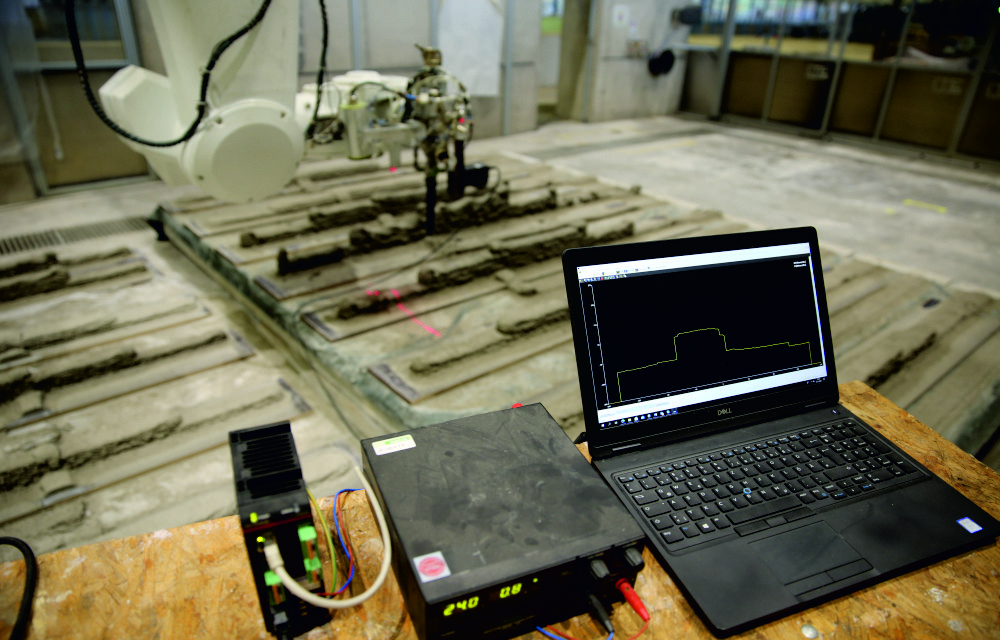
Initial investigations have shown that an online adaptation of the model is required during the printing process due to the printing duration. In the course of this, laser profile sensors are used to monitor the applied material during the printing process. In combination with the process parameters, model optimization is made possible by feeding back the measurement data.
Cross project cooperation
Component and algorithm testing is carried out using concrete extrusion and shotcrete processes in cooperation with institutes at the Technical University of Braunschweig and the Technical University of Munich.
With the Digital Building Factory (DBFL) and multiple mobile robots, innovative nine-axis robots for concrete processing are available across the TRR 277 research program. Especially with a workspace of 16 x 9 x 4 meters at the DBFL, there is a possibility of evaluating advanced path planning and control concepts using unscaled production trials. In joint efforts with the project partners, solutions for the construction industry’s challenges are thus developed.
For more information on TRR 277 “Additive Manufacturing in Construction”, interested parties can visit www.tu-braunschweig.de/trr277.