Mit der fortschreitenden Miniaturisierung technischer Bauteile und den Entwicklungen im Bereich der optischen Technologien nimmt die Bedeutung der Präzisionsmontage und ihrer Automatisierung stetig zu. Präzisionsmontageprozesse erfordern durch die hohen Genauigkeits- und Qualitätsanforderungen ein hohes Prozesswissen. Für die Automatisierung sind deshalb nicht nur präzise arbeitende Roboter, sondern auch eine Vielzahl an Sensoren notwendig.
Solche Automatisierungslösungen sind sehr kompliziert, aufwändig in der Programmierung und wenig anpassungsfähig. Die Programmierung erfolgt bisher direkt am Roboter, meist im sogenannten Jointspace. Das bedeutet, dass alle Bewegungen direkt am Roboter programmiert und notwendige Koordinatentransformationen (zum Beispiel vom Kamerasystem zum Greifersystem) manuell durchgeführt werden müssen.
Intuitive Roboterprogrammierung
In den vergangenen Jahren haben neue, intuitive Programmiermethoden den Einsatz von Robotern zur Prozessautomatisierung erheblich vereinfacht. So können auch Personen ohne hohes Fachwissen neue Roboteranwendungen in ihre Produktion integrieren und die Produktivität steigern. Diese intuitiven Programmiermethoden basieren im Wesentlichen darauf, die textuelle Programmierung zu abstrahieren. So müssen Anwendende keine Programmiersprache beherrschen, sondern erstellen das Roboterprogramm aus leicht verständlichen Funktionsbausteinen (z.B. Bewegen, Greifen).
Obwohl diese Programmiermethoden in der Industrierobotik weit verbreitet sind, findet man sie in der Präzisionsmontage selten. Auch eine Offline-Programmierung sowie Montagesimulationen sind nicht verbreitet. Die besonderen Herausforderungen bei der Automatisierung in der Präzisionsmontage liegen im benötigten Expertenwissen und dem komplizierten Systemaufbau. Dies erschwert sowohl die Programmierung als auch die Simulation.
Framework für die Präzisionsmontage
An intuitiven und (teil-)autonomen Programmierverfahren für die Präzisionsmontage forscht derzeit das match – Institut für Montagetechnik und Industrierobotik der Leibniz Universität Hannover. Ziel der Forschenden ist es, den Anwender bei der Programmierung von Präzisionsmontageprozessen Schritt für Schritt immer weiter zu unterstützen. Dies beginnt bei einer zunehmend einfacheren Programmierung und erstreckt sich bis zur Unterstützung durch autonome Prozesse.
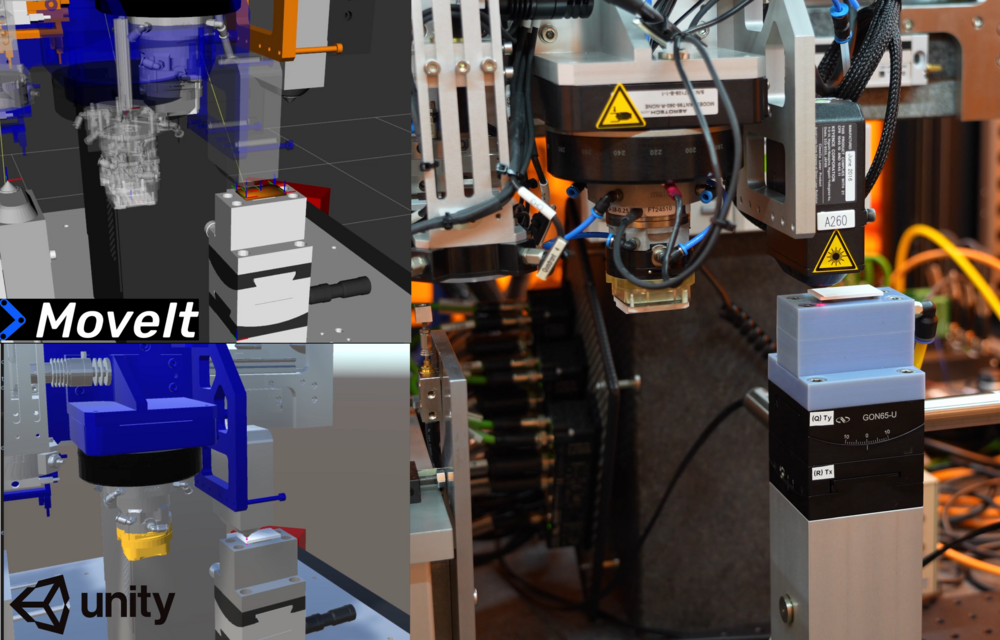
Dabei wird sowohl die Roboterprogrammierung als auch die Verwendung von Sensorik (wie Bilderfassungs- und Lasermesssysteme) einbezogen. Ausgangsbasis ist die Präzisionsmontageanlage am match, für die ein ROS2-Framework aufgebaut wurde. ROS2 (Robot Operating System) ist ein offenes Betriebssystem für Roboter, das unabhängig von der Hardware Bibliothek für die Roboterprogrammierung zur Verfügung stellt. Ein Beispiel für ein Tool innerhalb dieses Frameworks ist Moveit2, das Funktionen für die Bahnplanung bietet. Die Anlage wird zudem in Unity simuliert, einer Plattform, die neben der Spielentwicklung auch physikalische Simulationen ermöglicht. So ist sowohl eine Simulation der Montageprozesse als auch eine Offline-Programmierung mit einer nahtlosen Übertragung auf die reale Anlage möglich.
Ein zentraler Ansatz für die intuitive Programmierung sind sogenannte Skills, also universelle Funktionsbausteine, die alle notwendigen Fähigkeiten für Präzisionsmontageprozesse abbilden. Diese Skills sind hardwareunabhängig und können in verschiedenen Anlagen eingesetzt werden, sofern diese ROS2-kompatibel sind. Der Anwender kann mit diesen Skills den Montageprozess programmieren. Zudem können die Skills mit Methoden der künstlichen Intelligenz verbunden werden, um autonome Prozesse zu realisieren.
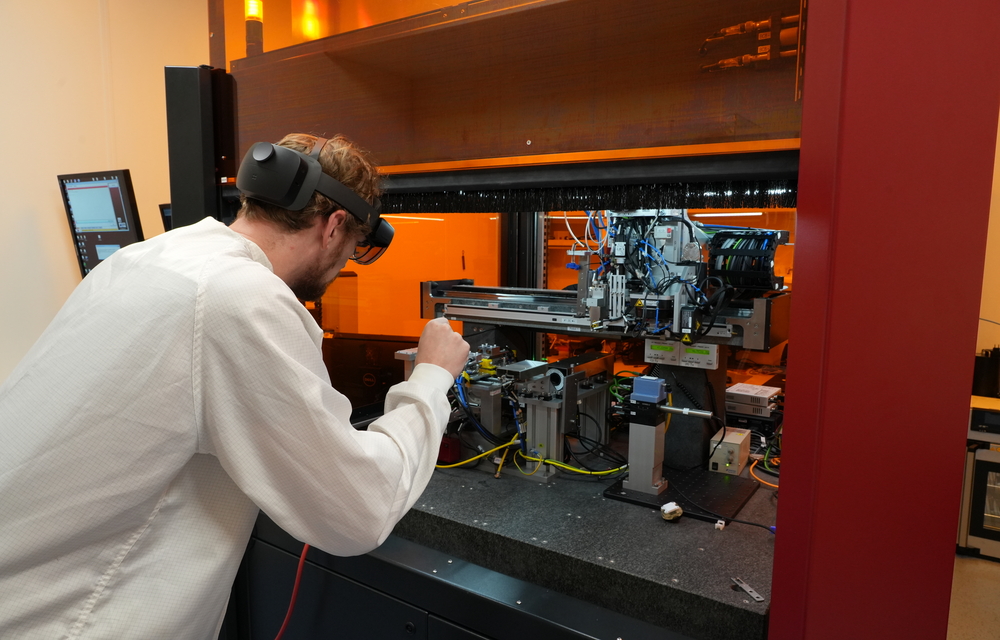
Prozesswissen sichtbar machen mit AR und VR
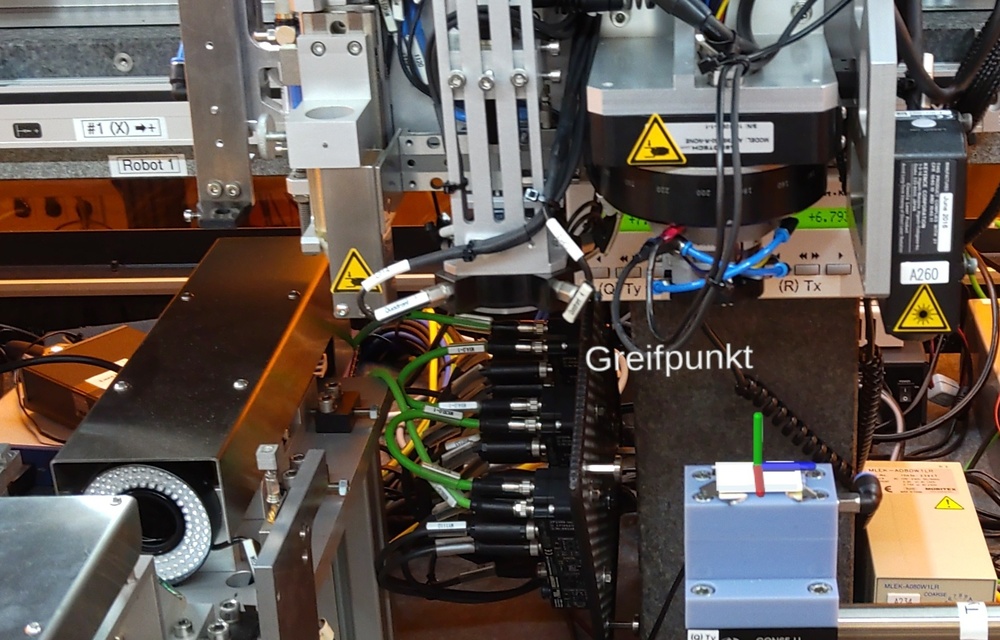
Die Abbildung der Präzisionsmontageanlage in Unity bietet neben der Simulation den Vorteil, dass Augmented Reality (AR) und Virtual Reality (VR) Applikationen einfach umgesetzt werden können. AR und VR bieten eine intuitive Mensch-Maschine-Schnittstelle und können im Kontext von Präzisionsmontageprozessen dazu dienen, Prozesse und insbesondere Prozesswissen zu visualisieren (z.B. Greifpunkte von Bauteilen). Zudem können Prozesse, die im Mikrometerbereich ablaufen, dem Anwender dargestellt und das Prozessverständnis erhöht werden.
Die beschriebenen Forschungsarbeiten und -ansätze am match tragen so dazu bei, die Automatisierung von Präzisionsmontageprozessen zu vereinfachen und für Personen ohne Expertenwissen zugänglich zu machen.